
The unbeatable RoboKeeper
EMCOMO supplies Control Computer
Neymar couldn’t beat him, Ronaldo failed, but the German keeper would not have conformed with the rules - it is a robot. Called ‘RoboKeeper’, the computer-controlled football machine is a development of the Fraunhofer-Institut für Materialfluss und Logistik (IML).
Much like a tabletop football game figurine, it consists of a goalie mannequin, rotatable to the left or right by an axle attached to its feet, in effect leaping for the left or right goalpost. Two cameras mounted above the goal, each affixed slightly above the upper end of either goalpost, supply the pictures from which in the updated version a specialised EMCOMO industrial PC based on a Kontron KBox A-103 generates a three-dimensional image of the goal area. The cameras register the ball at over 85 pictures per second, from which the Kontron industrial computer computes the ball’s position, contrasting it to the last known position and determining the ball’s speed and direction. Upon a player kicking the ball towards the goal, the computer determines the point at which it will cross the goal line, and within fractions of a second directs the actuators to move the goalie dummy into the ball’s path at up to 50 km/h. So far, so easy. The electronic goalie, which is being continuously upgraded, has found its way into the world’s sporting arena with its 4attention sportmarketing & event team.
Around the world of events
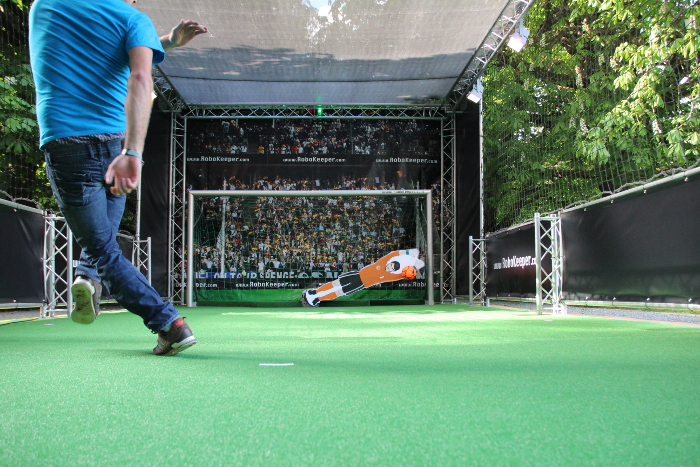
RoboKeeper can block penalty shots at up to 100kmph of speed. As a point of reference: in the European Football Championship 2012 finale, penalty shots clocked in marginally faster at 120kmph. The human goalies Andreas Köpke and Petr Kouba managed to parry only one out of twelve shots in total. Even balls that swerve, bounce, or rebound off the sides cannot fool the electronic goalie. Since its first performance in 2007, it has performed its duty on 250 days, all around the world, showing its mettle against sporting enthusiasts from Shanghai through Cape Town to Canada. By now, RoboKeeper has been trained to compete in other types of sport as well, having mastered ice hockey and handball.
As an event entertainment, it is designed for life on the road: it is robust, impervious to transport and assembly vibrations, and is easy to put together. It is also equipped to withstand moisture, making the system suitable for all-weather operation. RoboKeeper will perform without fail even in adverse lighting conditions such as dusk, artificial light from above or strong glare from the side. To prevent a player getting inside RoboKeeper’s way and getting hit by the goalie mannequin, possibly resulting in injury, a PLC programmable logic controller will act as a kill switch, stopping the robot in its tracks as soon as a light barrier in front of the device is interrupted.
When RoboKeeper isn’t busy facing off with the heads of world football, his speed can be reduced to offer his human opponents a sporting chance. The appeal is bigger for event participants if the goalie machine can be beat. Sometimes, the venue will not permit the full eleven meters for the goal area, shortening reaction times. One should not be fooled by the playful easiness RoboKeeper exhibits. The Fraunhofer developers had to overcome significant technical difficulties in developing their system.
What it takes to make a RoboKeeper: technical specifications
For one, there are the physical limitations: The goalie mannequin needs to be light enough for quick acceleration, yet robust enough to withstand the manifold shots. It should be inexpensive in manufacturing and without sharp edges, which could pose a safety risk. The developers settled on a PU foam body, reinforced by an aluminium profile and spine. Weighing in at 4.3kg, it will withstand several thousand shots.
The motor, too, had to be powerful enough to move the goalie mannequin with precision despite the long lever. It needed to not overheat or suffer fatigue even after extended operation. Its gears needed to work accurately enough to allow for fine adjustment of the mannequin. A no-clutch special motor usually found in high-tech mechanical engineering or aerospace application met the requirements.
Just as important were hard- and software, making up, if you will, RoboKeeper’s “brains”. The requirements called for an extremely fast system: Given a shooting speed of 100kmph, it will take the ball just 0.4 seconds to reach the goal. The goalie mannequin itself takes up to 0.3 seconds to meet the ball, even though RoboKeeper is being accelerated 17 times as fast as a formula 1 racing car. All computations – the measurement and determination of the trajectory, designating the goalie’s position and controlling the motor – must be completed within one tenth of a second.
A system this quick and up to facing the rough conditions of event service required a high-performance computer. For the next-to-instantaneous transmission of camera images, two gigabit interfaces were needed. The quad-core architecture enabled parallel image processing.
Additionally, the system needed to be up to ‘life on the road’ and at events: frequent assembly and dismantling, as well as variable environmental conditions. For practical reasons, it needed to be small in size, be resistant to vibration, forgo movable parts such as fans or rotating mass storage devices, and not contain any socketed elements prone to getting detached. It had to exhibit high EMC resistance (electromagnetic compatibility) so as not to suffer from other devices’ interferences or interfere with them.
All these requirements were met by the Kontron KBox A-103 supplied in a specially modified version by Kontron partner EMCOMO Solutions AG, based in Neu-Ulm. EMCOMO is a systems integrator and value-added reseller for boards and systems. The company offers valuable services for embedded computer customers. The fanless Kontron KBox A-103 features the high-speed Intel Atom E3845 processor with 4*1.91GHz clock frequency, up to 4GB RAM main storage and up to 16 GB onboard flash storage. For decentralised connection of industrial ethernet- and traditional field bus components, the Kontron KBox A-103 offers 2GbE and up to 3 serial interfaces (RS232/422/485, Profinet fieldbus via mPCIe). A monitor can be connected through a DisplayPort- or VGA interface. The KBox runs on 24 V DC (+20 % / -15 %) and generates very little heat at a typical power loss rate of 11W.

EMCOMO modified the Kontron KBox A-103 to meet RoboKeeper’s special requirements in event operation, installing a CF card reader with SATA connection as well as a third ethernet interface. For these enhancements, modifying the housing became necessary. On top of that, a CAN controller (Mini-PCIe) was integrated as a field bus interface. Linux was customised and installed on the CF card, running 15,000 lines of C++ code based on the Fedora Linux operating system.

The images generated by the twin cameras are each being transmitted to the KBox A-103 through a dedicated gigabit ethernet port and GigE Vision standard. Here, the cameras’ images are used to calculate the ball’s trajectory in symmetrical multiprocessing on one processor core each within no more than 90ms. It takes no longer than another 2ms to determine the goalie mannequin’s angle necessary. The KBox A-103 with its easy implementation allows for easy systems integration and programming.
EMCOMO is quite pleased with RoboKeeper’s performance, CTO Karl Judex stated: “Non-IT-experts are always quite impressed by the performance of the goalie. It’s even harder to imagine the electronics being that much faster than a real goalie. This makes RoboKeeper such an attraction, and such a blast, for everyone. On top of that, he’s quite reliable: so far, his sensitive components have weathered everything the events and elements have subjected them to, without any limitation. For us, this makes RoboKeeper the world’s best goalkeeper bar none.”
For more information, please contact info@emcomo.de or visit www.emcomo.de
<< back to EMCOMO Solutions Projects